650 & 750 Grain Cart













| Grain Cart Specifications | 750 Bushel | 650 Bushel |
|---|---|---|
| Capacity | 750 Bu. | 650 Bu. |
| Balanced Auger Size | 14" | 14" |
| Unloading Time (bu/min.) | 250 | 250 |
| Spindle Size | 4 1/2" | 4 1/2" |
| Tractor HP Required | 150+ | 150+ |
| Hub Size | 10 bolt | 10 bolt |
| Tread Width (stand.) | 120" | 120" |
| Tread Width (opt.) | 120-144" | 120-144" |
| Tongue Frame | 4"x10" | 4"x10" |
| Tongue Weight (empty) | 1,240 lbs. | 1,190 lbs. |
| Tongue Weight (loaded) | 2,900 lbs. | 2,600 lbs. |
| Weight/Wheels & Tires | 8,220 lbs. | 7,560 lbs. |
| Weight/Tracks | NA | NA |
* Bushel capacity measured with #2 corn at 15% moisture content (56 lb. test weight)
Standard Features
• 1000 RPM PTO
• Protect auger driver and tractor PTO with the automatic reset “cut-out” clutch with overrunning clutch
• 2 grain viewing windows
• 7,000 lb. drop-leg tongue jack with separate storage position provides tighter turning radius
• Hand wheel operated clean-out door at bottom of auger for easy post season clean-out
• 30” hydraulic controlled flow gate
• High visibility - reflective decals
• LED Tail, flasher/turn signal lights and auger spotlight for nighttime operation
• Transport width: 12’ 9”’
• Welded box construction with silicone sealed seams resists rust and corrosion
• 22,500 lb. Ductile Iron Hubs
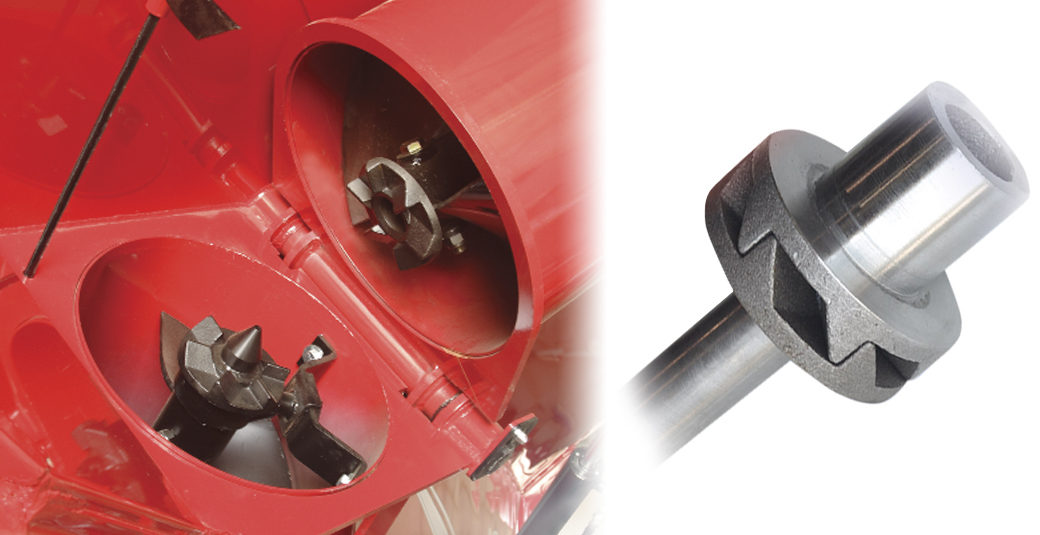
Auger
• 14” diameter balanced auger with 3/8” flighting and Posi-Drive connection
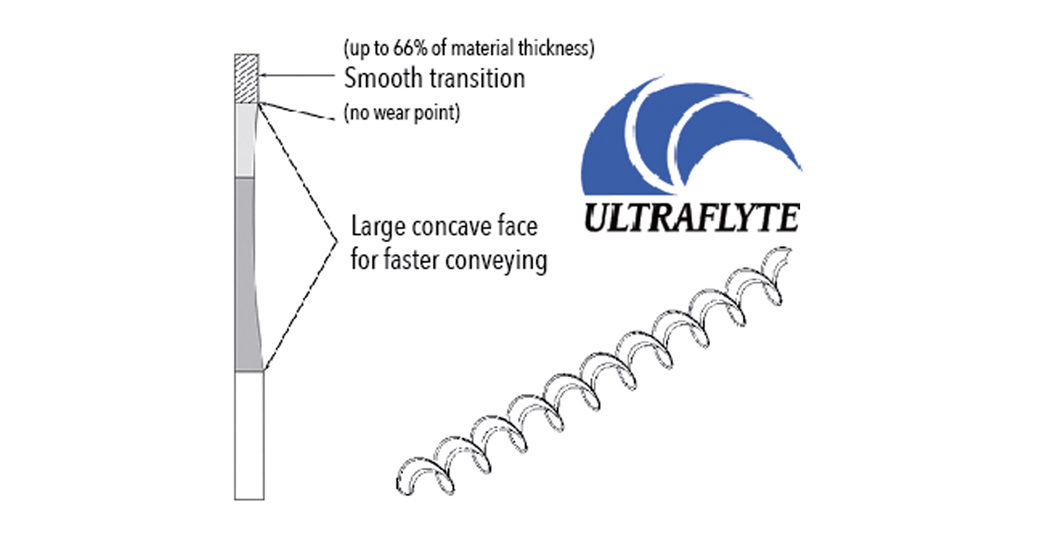
• UltraFlyte made with 1008/1010 high carbon steel including a thicker outer edge, resulting in up to 50% longer wear and faster conveying
• Forward reach auger for optimum operator visibility
• Auger folds within the width of the box for compact transporting and storage
Options
• Hydraulic Drive Kit (15-25 GPM oil flow required)
• Roll top tarp
• Ergonomic pendant control
• Adjustable auger spout
• Scale Kits
NOTES ON HYDRAULICS: A standard grain cart requires two hydraulic remotes. The optional adjustable spout requires an additional hydraulic remote. Additional 15 - 25 GPM oil flow is required for hydraulic unloading drive.
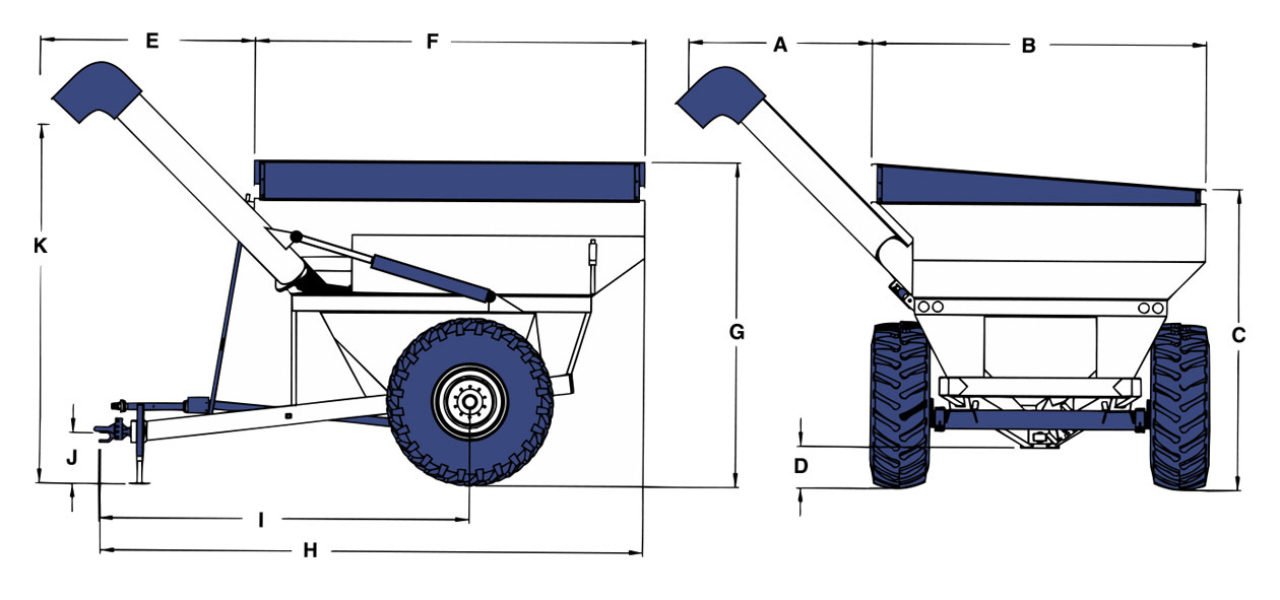
| 750 Bushel | 650 Bushel | |
|---|---|---|
A Auger extends to side | 7'7" | 7'7" |
| B Box width (transport) | 11'11" | 11'11" |
| C Height, low side | 11'1" | 10'1" |
| D Ground clearance | 18" | 18" |
| E Auger extends to front | 7'1" | 7'1" |
| F Box length | 14' | 14' |
| G Box height (high side) | 12'6" | 11'9" |
| H Total length | 20' | 20' |
| I Axle to tongue length | 13'6" | 13'6" |
| J Drawbar/tongue height | 22" | 22" |
| K Auger clearance height | 14' | 14' |